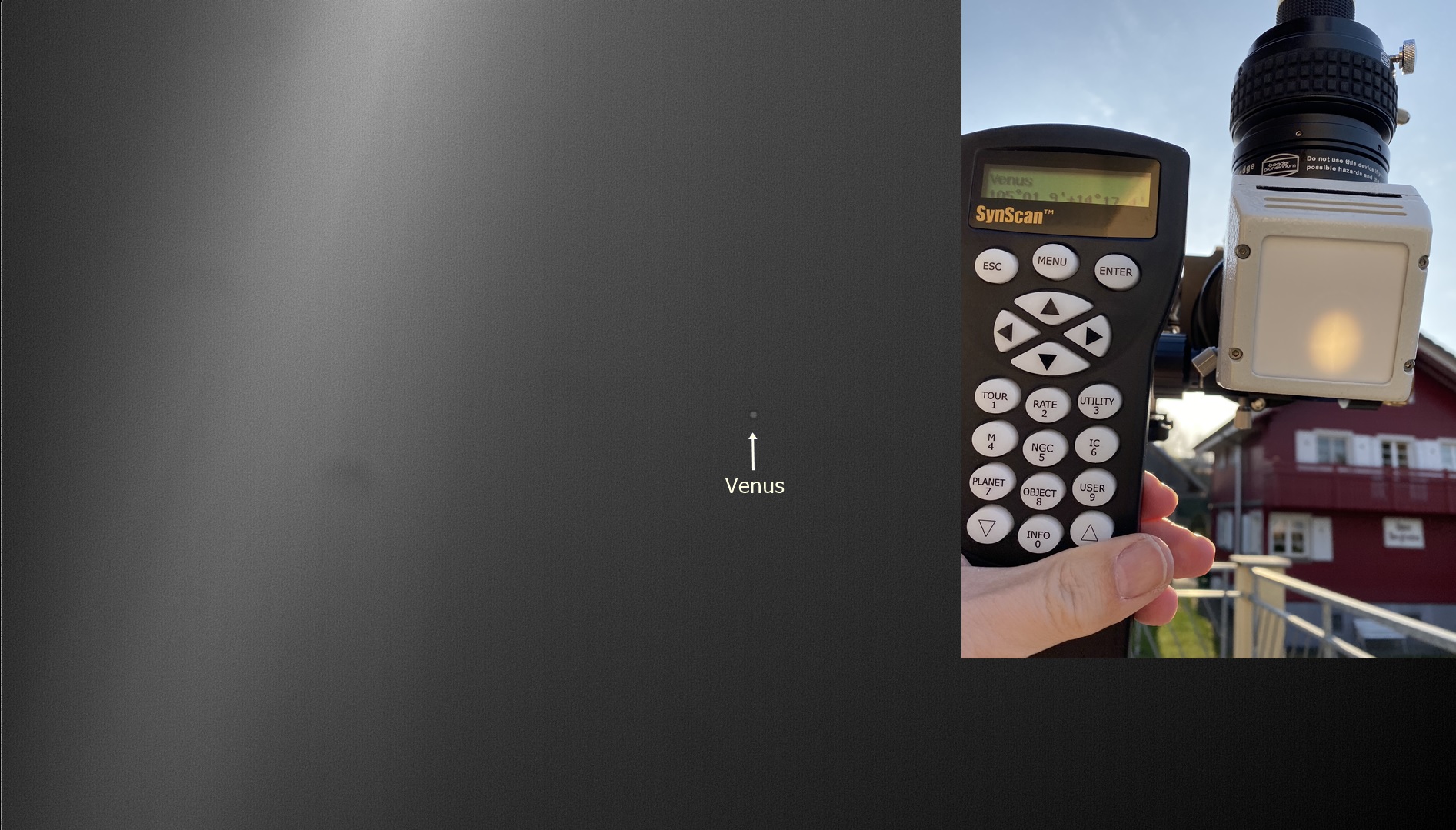
Am 26.03.2021 um 07:58 stand die Venus in oberer Konjunktion. Zum diesem Zeitpunkt stand die Venus 81' vom Sonnenzentrum und damit 65' vom Sonnenrand entfernt.
Um 07:51 konnte ich sie erstmals sehen, sodass ich den genauen Zeitpunkt der Konjunktion visuell beobachten konnte. Danach habe ich noch ein Bild mit der ASI-ZWO 290MM gemacht, dazu musste ich zusätzlich eine kleine Abschattungsvorrichtung bauen. Als Fernrohr verwende ich einen Baader Travel-Companion 95/560, der anscheinend einen extrem reflexarmen Tubus hat.
Meine Vorgehensweise zur Beobachtung der Venus in den letzten Wochen war folgende: Montierung (AZ-EQ6) mit Hilfe der Sonne kalibrieren, dann visuell die Sonne scharf stellen. Beobachtung mit einer Baader 3.8 Sonnenfotofolie + Baader Cool Ceramic Herschelprisma (natürlich ohne die ND-Filter) + Okular mit 0.3 ND-Filter + Beloptik UV/IR auf KG3 Filter. Die Folie darf man normalerweise nicht visuell nutzen, mit dem Herschelprisma (HP) plus dem Beloptik Filter geht es allerdings schon, da dann UV und Infrarot komplett ausgefiltert werden.
Dann auf die Venus einstellen und den Front-Filter abnehmen. Auf dem Projektionsschirm des Herschelprismas sieht man genau, wo die Sonne steht (nicht mehr im Zentrum). Bei entsprechender Vergrößerung steht die Sonne außerhalb des Bildfeldes, und die große Helligkeit wird durch das Herschelprisma (ca. ND 1.4) und den 0.3 ND-Filter abgedämpft. Und dann sieht man die Venus.
In solcher Sonnennähe ohne Sonnenfilter zu arbeiten birgt das Risiko, dass versehentlich Sonnenlicht in das Teleskop gerät, was bei visueller Nutzung zu sofortiger Erblindung führt! Wir raten Ihnen deshalb von der Nachahmung ab.
Herschelprismen müssen immer mit zusätzlichen Lichtdämpfungsfiltern betrieben werden. Die vom Prisma zum Okular reflektierte Energie ist noch um den Faktor 1000 zu hoch. Aus diesem Grund bieten wir unsere Sicherheits-Herschelprismen nur mit eingebautem ND 3.0 Dämpfungsfilter an. Die fotografische Version beinhaltet noch weitere ND-Filter zur selektiven Lichtdämpfung. Bitte nur mit größter Vorsicht verwenden.
Simplified illustration showing sequence of events in rolling and global shutter modes. Note that while a single image acquisition is represented, each mode is also compatible with 'overlap' readout, whereby the next exposure begins simultaneous with image readout.
Andor's Neo and Zyla cameras, utilizing the CIS 2051 sensor, and our newest large area Balor sCMOS camera (with its sensor being unique to Andor) were designed with a 5T (5 transistor) pixel architecture to offer choice of both Rolling and Global Shutter modes (also called Rolling and Global Exposure modes). This provides superior application and synchronization flexibility and the ability, through global shutter, to closely emulate the familiar 'Snapshot' exposure mechanism of interline CCDs.
Traditionally, most CMOS sensors offer either one mode or the other, but the sensors of Andor’s Balor, Neo and Zyla sCMOS cameras offer the choice of both rolling and global shutter mode. With these camera solutions, the user benefits from the capability to select (via software selection) either readout mode from the same sensor, such that the most appropriate mode can be chosen dependent on specific application requirements.
A representation of the read noise distribution for a sCMOS Sensor.
sCMOS based cameras can provide a much lower noise floor than typical CCD based cameras. A low noise floor means that the camera can detect signals that would otherwise have remained hidden within the noise background which helps to produce a high-fidelity image. A low noise floor also allows for the widest possible dynamic range. One of the main types of noise that makes up this noise floor comes from “Read Noise”.
EMCCD technology, sometimes known as ‘on-chip multiplication’, is an innovation first introduced to the digital scientific imaging community by Andor Technology in 2001, with the launch of our dedicated, high-end iXon EMCCD Camera platform of ultra-sensitive cameras. Essentially, the EMCCD is an image sensor that is capable of detecting single photon events without an image intensifier, achievable by way of a unique electron multiplying structure built into the chip.
The transit method is currently one of the most successful indirect techniques to detect extrasolar planets. To date, over 3800 exoplanets were discovered, from which the majority was found using the transit method. This technique is based on observations of a planet passing in front of its host star (= transit), as seen from an observer on Earth. The planet in transit blocks a fraction of the stellar light and thus causes the stellar brightness to decrease periodically. This periodic dimming of the stellar light is measured in terms of a transit light curve.
In the field of modern scientific-grade CCD detectors the arrival of back-illuminated CCDs and Electron-Multiplying EMCCDs has offered key enabling technology for the growing range of applications where the photon signal available is extremely low. Such applications include low-light cell microscopy and fast chemical mapping.
On the webpage of Andor Technology presents one of the key challenges associated with the use of back-illuminated, CCDs for Near-Infrared (NIR) detection, namely optical etaloning, and outlines with particular reference to a manufacturing process called ‘fringe suppression’.
Hinweis: Der ursprüngliche Text wurde vom Verfasser vor ungefähr 25 Jahren verfasst und ist im Prinzip inzwischen irrelevant, da es heute elektronische und andere technische Methoden gibt, eine parallaktische Montierung zeitnah poljustiert aufzustellen. Die Stichworte sind hier Polsucherfernrohre, GoTo Montierungen, der QHY Polmaster, die Star Aid Revolution, die Software PHD Guiding und das so genannte "plate solving".[br]
Julius Scheiner (geb. 25. November 1858 in Köln; gest. 20. Dezember 1913 in Potsdam), Quelle: gemeinfrei.
Die Scheiner Methode ist das ursprüngliche, historische Verfahren, um eine parallaktische Montierung (egal von welchen Bautyp) präzise auf den wahren Himmelspol auszurichten und somit lang belichtete Fotografie mit punktförmige Sternabbildungen zu ermöglichen. Der Vorgang wird auch "Scheinern" oder "Einscheinern" genannt, im englischen Sprachraum ist die Bezeichnung "Drift Alignment Method" gebräuchlich.
Entwickelt und publiziert wurde die Methode vom deutschen Astrophysiker Julius Scheiner 1897 in Zusammenhang mit seiner Mitwirkung bei den internationalen Arbeiten zum einem photographischen Himmelsatlas.
Da alle modernen Methoden (mit Ausnahme des Posucherfernrohrs) letztlich auf die Scheinersche Methode zurück greifen, hat der Verfasser den ursprünglichen Text aktualisiert und stellt ihn hier zum Verständnis der Poljustierung einer parallaktischen Montierung zur allgemeinen Verfügung.
Ortsfeste und/oder auch transportable parallaktische Montierung müssen – wenn sie fotografisch eingesetzt werden sollen – eine genau definierte Aufstellungsposition am Beobachtungsort haben. Dabei muss die Rektaszensions- oder Polachse der Montierung genau parallel zur Lage der gedachten Erdrotationsachse am Beobachtungsort stehen. Das bedeutet, sie muss im Azimut (Horizontal, Ost-West) exakt in Nord-Südrichtung stehen und ihr Winkel zur Erdoberfläche muss exakt dem Winkel der geografischen Breite des Beobachtungsortes entsprechen. Dieser Winkel wird auch als Polhöhenwinkel (φ, psi) bezeichnet. Genau auf diesen Punkt des Himmels zeigt die gedachte Rotationsachse der Erde, dort befindet sich der wahre Himmelspol (gleiches gilt natürlich auch für den Südhimmel). Die so genannte Äquatorhöhe ist entsprechend die Höhe des Himmelsäquators zum Horizont und berechnet sich aus der Polhöhe zu: 90° minus Polhöhe.
Um diesen Punkt am Himmel scheinen sich alle Sterne in Kreisbögen zu bewegen (die Bewegung ist natürlich nur die Projektion der Erdrotation). Dicht am nördlichen Himmelspol steht der helle Polarstern (Alpha Ursae Minoris), am südlichen Himmelspol gibt es leider keinen hellen Stern.
Der Polarstern hat zur Zeit einen Abstand von einem knappen Grad zum wahren Himmelspol und beschreibt deshalb innerhalb von 23h 56m 04,1s (das ist die wahre Rotationsperiode der Erde) ebenfalls einen kleinen Kreisbogen.
Der nördliche Himmelspol: Die Abbildung demonstriert dies zur Erläuterung. Fällt man (gedanklich) ein Lot vom Polarstern zum Horizont, so markiert der Punkt geografisch Nord. Hier ist zusätzlich noch das Sternbild Großer Wagen in vier verschiedenen Stellungen eingezeichnet, die es im Lauf eines Tages bzw. eines Jahres einnimmt.
Das Bild zeigt den Effekt der Erdrotation einer fest stehenden Kamera mit Blick auf den südlichen Himmelspol. Die Belichtungszeit betrug 37 x 300 Sekunden.
[br]
Verlängert man den Abstand der hinteren beiden Kastensternen des großen Wagens (Abbildung links oben) um ihre fünffache Länge, trifft man ziemlich genau auf den Polarstern. Das Kreuz markiert die Stellung des wahren Himmelspols.
Fast alle aufwändigere gefertigte transportable parallaktische Teleskopmontierungen verfügen heute (zumindest optional) über ein so genanntes Polsucherfernrohr, welches eine poljustierte Aufstellung der Montierung stark vereinfacht und zeitlich beschleunigt. Hier ist die Rektaszensionsachse (Polachse) hohlgebohrt und dort wird dann ein kleines Fernrohr mit einer entsprechenden Fadenkreuzplatte eingesetzt. Wenn sich der Verfasser richtig erinnert, führte die Firma Vixen Anfang der 80ger Jahre erstmalig zusammen mit der kleinen transportablen Polaris Montierung das Polsucherfernrohr ein.
Für eine exakte Aufstellung liefert aber auch das Polsucherfernrohr nur einen (allerdings schon recht genauen) Richtwert. Größere Montierungen oder zum Beispiel Eigenkonstruktionen verfügen oft über kein Polsucherfernrohr. Auch die bei Amateuren beliebten Schmidt-Cassegrain Teleskope in Gabelmontierungen haben selten ein Polsucherfernrohr, selbst wenn sie mit einer Polhöhenwiege parallaktisch aufgestellt werden können.
Moderne parallaktische Goto-Montierungen verfügen zusätzlich zum Polsucherfernrohr in der Steuersoftware des Teleskops entsprechende Routinen (normalerweise die "Drift Alignment Methode"), die es gestatten die Montierung korrekt aufzustellen. Aber auch hier können Restaufstellungsfehler bleiben, die behoben werden müssen.
Ein moderner Ansatz dazu ist auch das Plate Solving. Dabei wertet ein Computer die Bilder einer Kamera aus, erkennt die Sterne automatisch und gibt an, wie die Montierung ausgerichtet werden muss, damit sie möglichst perfekt eingenordet ist (Soll/Ist Vergleich eines Sternfeldes in der Nähe des wahren Himmelspol). Das funktioniert zum Beispiel über die Kamera, die auch für das Autoguiding eingesetzt wird, und spezieller Software auf einem Laptop (z.B. phd Guiding), oder ganz bequem mit Stand-Alone-Systemen wie dem [product sku:"1485001"] oder dem PoleMaster von QHY.
Was aber tun, wenn man an seiner Montierung keine dieser Möglichkeiten hat? Nun dann muss man auf die Scheinersche Methode zurück greifen, die folgend für die Aufstellung einer parallaktischen Montierung auf der nördlichen Hemisphere beschrieben wird. Es ist leider eine zeitraubende Methode – aber die genaueste die es gibt. Je genauer man vorab die Rektaszensionsachse auf den Himmelspol ausrichten kann, desto schneller wird ein Ergebniss erreicht.
Also kurz zusammen gefasst: Bei der Scheinerschen Methode werden sowohl Azimut (Ost-West) als auch die Polhöhe der Rektaszensionsachse präzise für Ihren Aufstellungsort ermittelt und eingestellt. Nach erfolgter Justage steht die Rektaszensionsachse exakt parallel zur Erdrotationsachse und zeigt auf den wahren Himmelspol.
Die Bildorientierung im Teleskop Für ein erfolgreiches "Scheinern" ist die Kenntnis der Bildorientierung beim Blick durchs Teleskop essentiell wichtig (ein Verfahren ohne Kenntnis der Bildorientierung beschreiben wir am Ende des Artikels). Ein Refraktor im gestrecktem Strahlengang - ohne zusätzliches Prisma oder einen Zenitspiegel und jedes 2-Spiegel Teleskop (also der Newton, ein Schmidt Cassegrain oder ein Maksutov Teleskop) - drehen das Bild um 180 Grad gegenüber dem Blick zum Himmel mit dem bloßen Auge. Die Bildorientierung im Okular ist also: Süden oben, Norden unten, Westen links und Osten rechts. Alle folgendes Graphiken und Texte beziehen sich auf den Anblick in einem Refraktor mit gestrecktem Strahlengang, also ohne Zenitprisma, Zenitspiegel oder andere - die Bildorientierung verändernden - Zubehörteile. Das einzige Prisma welches eine Bildorientierung wie beim Anblick mit dem bloßem Auge erzeugt ist das Amiciprisma (Nord oben, Süd unten, Ost links und West rechts).
Verfahren Sie nun wie im folgenden beschrieben:
Stellen Sie Ihre Montierung auf und richten Sie vorab die Rektaszensionsachse so genau wie möglich auf den Himmelspol. Wenn Sie ein Polsucherfernrohr haben und der Himmelspol von Ihrem Beobachtungsstandort aus sichtbar ist, dann ist das kein Problem. Für alle anderen Fällen können Sie zur Azimutausrichtung (Nord-Süd) einen Peilkompass einsetzen (beachten Sie dabei die magnetische Missweisung, es muss geografisch Nord und nicht magnetisch Nord eingestellt werden).
Die meisten Montierungen verfügen am Polblock der Montierung eine grobe Winkelskala zur Einstellung des Polhöhenwinkels. In Baumärkten findet man aber auch Aufsatzwinkelmesser, die es gestatten auf der Rektaszensionsachse aufgesetzt und auf etwa ±1 Grad abgelesen werden zu können. Viele Smartphones haben Neigungsmesser und Kompass integriert, auch wenn die Anzeigen nicht immer hochpräzise sind.
Was Sie nun noch brauchen ist ein stärker (ca. 125fach) vergrößerndes – am besten beleuchtetes – Fadenkreuzokular. Steht Ihnen ein beleuchtetes Fadenkreuzokular nicht zur Verfügung, tut es auch ein einfaches. Stellen Sie Ihren Referenzstern einfach unscharf ein, dann sehen Sie das Fadenkreuz auch deutlich.
Begonnen wird das Scheinern einer Montierung immer mit der Azimuteinstellung der Rektaszensionsachse. Die im folgenden beschriebenen Himmelsrichtungen zum Scheinern sind bewusst gewählt, an diesen Positionen des Himmels sind Abweichungen am schnellsten sichtbar.
Zu Beginn suchen Sie sich (aus einem Himmelsatlas oder einem Planetariumsprogramm) einen hellen Stern, der zu Beginn des Scheinerns grob in Südrichtung (Meridian) steht und dabei nicht weit vom Himmelsäquator entfernt sein sollte (Deklination = 0 Grad).
Bringen Sie den Stern in das Gesichtsfeld des Okulars und orientieren Sie den waagerechten Faden so, dass der Stern sich während einer Bewegung der Rektaszensionsachse auf ihm (dem waagerechten Faden) hin- und her bewegt.
Ist Ihre Bildorientierung korrekt, so muss der Stern bei abgeschalteter Nachführung auf dem waagerechten Faden von rechts nach links (Ost - West) bewegen. Positionieren Sie den Stern nun in die Fadenkreuzmitte und beobachten Sie seine Bewegung auf dem senkrechten Faden.
Achtung:Sie dürfen ab jetzt – bis zum Ende des Scheinerns – die Stellung des Fadenkreuzokulars im Okularauszug nicht mehr verändern!
Die Position des Sternes auf dem waagerechten Faden des Fadenkreuzes dürfen Sie durch Bewegung der Rektaszensionsachse jederzeit verstellen.
Weicht der Stern nun im Laufe der Zeit auf der senkrechten Achse nach oben (Süden) ab, so müssen Sie das Nordende der Rektaszensionsachse nach Westen verdrehen.[br]
Weicht der Stern im Laufe der Zeit auf der senkrechten Achse nach unten (Norden) ab, so müssen Sie das Nordende der Rektaszensionsachse im Azimut ein Stückchen nach Osten korrigieren.[br]
Diesen Prozess wiederholen Sie so oft, bis sich der Stern ca. 20 Minuten auf dem senkrechten Faden nicht bewegt. Und noch einmal zur Erinnerung: die Rektaszensionsachse dürfen Sie jederzeit korrigieren, nicht aber in Deklination nachstellen (deren Abweichung soll ja bestimmt werden).
Zur Azimuteinstellung haben die meisten Montierungen am Nordende der Rektaszensionsachse eine Feineinstellung, bestehend aus zwei Schrauben, die gegenläufig auf einen Lagerbock drücken.
Nun folgt die Justierung der Polhöhe. Wählen Sie dazu einen Stern in östlicher Richtung, ca. 30 Grad über dem Horizont. Zentrieren Sie ihn auf die Fadenkreuzmitte und beobachten Sie seine Abweichung auf dem senkrechten Faden, der jetzt etwa im Winkel von 45 Grad steht.
Bei abgeschalteter Nachführung muss sich der Stern diagonal von rechts oben nach links unten bewegen.[br]
Weicht der Stern nach links oben (Süden) ab, so muss die Rektaszensionsachse steiler (höher) gestellt werden.[br]
Weicht der Stern auf dem Faden nach rechts unten (Nord) ab, so ist die Polhöhe zu verringern (flacher).[br]
Auch hier ist der Prozess so lange zu wiederholen, bis der Stern ca. 20 Minuten ohne Abweichung in Nord-Süd Richtung auf der Fadenkreuzmitte stehen bleibt. Wenn Sie jetzt wieder zum Ausgangspunkt zurückgehen und einen Stern in Südrichtung beobachten, kann es sein, dass Sie das Azimut leicht korrigieren müssen. Und dann das ganze noch einmal für die Polhöhe.
Für ortsfeste Montierungen und langbrennweitige Teleskope kann das Einscheinern schon die ganze Nacht dauern. Für transportable Instrumente – mit weniger hohen Ansprüchen und einiger Erfahrung mit dem Scheinern – sollte man nach ca. 60 Minuten fertig sein.
Insbesondere für mobile Geräte sind die integrierten Software-Routinen der Montierungen – insbesondere in Kombination mit einem Fadenkreuzokular, um die Referenzsterne mit hoher Genauigkeit im Teleskop zu zentrieren – oder das Plate-Solving heute gute Alternativen, um in kürzerer ebenfalls eine meist ausreichende Präzision zu erreichen, sodass ein Autoguider die verbleibenden Fehler ausgleichen kann und auch die Bildfelddrehung nicht stört.
Für eine rein visuelle Beobachtung spielt die Aufstellung kaum eine Rolle – es sei denn man möchte die Teilkreise einer Montierung zur Einstellung von Beobachtungsobjekten nach Rektaszension und Deklination nutzen. Auch dann muss die Montierung exakt aufgestellt sein.
Bei der Fotografie muss die Montierung exakt aufgestellt sein. Ansonsten rotiert das Bildfeld um den Leitstern. Das bedeutet, der Leitstern (meist im Bildmittelpunkt) wird punktförmig, alle Sterne weiter außen in immer längeren Kreisbögen abgebildet.
Ein Autoguider kann eine schlecht eingenordete Montierung zwar perfekt nachführen – aber nur auf einen Stern. Auch bei bester Nachführung ist bei ausreichend schlechter Einnordung zwar der Stern im Zentrum perfekt scharf, aber alle anderen drehen sich um ihn.
Dabei spielt die Aufnahmebrennweite KEINE Rolle, sondern nur die Größe des Bildfeldes. Je größer es ist (in scheinbaren Graden), desto länger – je weiter vom Bildmittelpunkt entfernt – werden die Kreisbögen.
Die größten Fehler erhält man somit – logischerweise – bei Mittelformatkameras mit Weitwinkelobjektiven. Für Weitwinkelaufnahmen muss die Montierung also genauso gut aufgestellt sein, wie für Aufnahmen durch das Teleskop im Fokus. Setzen Sie Mittelformatkameras ein, muss die Aufstellung besser sein als für Aufnahmen mit Kleinbildkameras.
Moderne Messelektronik macht es möglich ...
Folgend kurz beschrieben eine Methode zur schnellen Poljustage in der die Kenntnis der Bildorientierung KEINE Rolle spielt.
Besorgen Sie sich dazu eine moderne digitale Wasserwaage. Diese Geräte zeigen Neigungswinkel auf etwa 0,1 Grad (6 Bogenminuten) genau an. Stellen Sie Ihre Montierung auf und nivellieren Sie den Achsblock parallel zur Erdoberfläche (Dosenlibelle). Nun richten Sie die Rektaszensionsachse (Polachse) mit einem Peilkompass möglichst genau nach Norden aus (auf der Südhalbkugel der Erde nach Süden, die Methode funktioniert dort genau so gut). Legen Sie nun die digitale Wasserwaage auf die Polachse auf und neigen Sie die Achse so, dass die Wasserwaage genau die geographische Breite ihres Beobachtungsortes anzeigt (die Polhöhe, bzw. geographische Breite für jeden beliebeigen Ort finden Sie im Internet).
Nun haben Sie die Polhöhe ihrer Montierung schon innerhalb weniger Minuten recht genau eingestellt. Bleibt die Azimutjustage der Polachse (exakt Norden oder Süden). Bestücken Sie nun ihr Teleskop mit einem Fadenkreuzokular und richten Sie das Teleskop möglichst exakt in Richtung Zenit (Ost oder Westlage spielt keine Rolle). In dieser Teleskoplage spielt die Bildorientierung im Okular KEINE Rolle.
Schalten Sie die Nachführung ein und suchen Sie sich einen helleren Stern und richten das Fadenkreuz in Rektaszension und Deklination aus (bevorzugt Rektasension waagerecht und Deklination senkrecht). Zentrieren Sie den Stern in die Fadenkreuzmitte und beobachten Sie die Abweichung des Sterns auf dem Deklinationsfaden (Abweichungen in Rektaszension können Sie mit der Feinbewegung jederzeit korrigieren).
Eine Abweichung des Sterns auf dem Deklinationsfaden können Sie jetzt direkt mit den Stellschrauben der Azimutfeineinstellung vornehmen. Verschieben Sie die Achse nach Ost oder West bis der Stern wieder in der Fadenkreuzmitte steht. Verbleibt der Stern für 10 bis 15 Minuten in Fadenkreuzmitte stehen, haben Sie eine recht gute Poljustage erreicht.
Für die heutzutage üblichen kurzen Belichtungszeiten ist die Genauigkeit der Poljustage ausreichend und auch GoTo Positionierungen sollten bei schwächeren Vergrößerungen erfolgreich sein.
Bei einer größeren Anzahl von Einzelbelichtungen wird sich zwischen den einzelnen Rohbildern zwar eine geringe Bildfeldrotation ergeben, die aber die moderne Stackingsoftware ausgleicht.
Und zum Abschluss noch ein kurzer Exkurs zum Südhimmel.
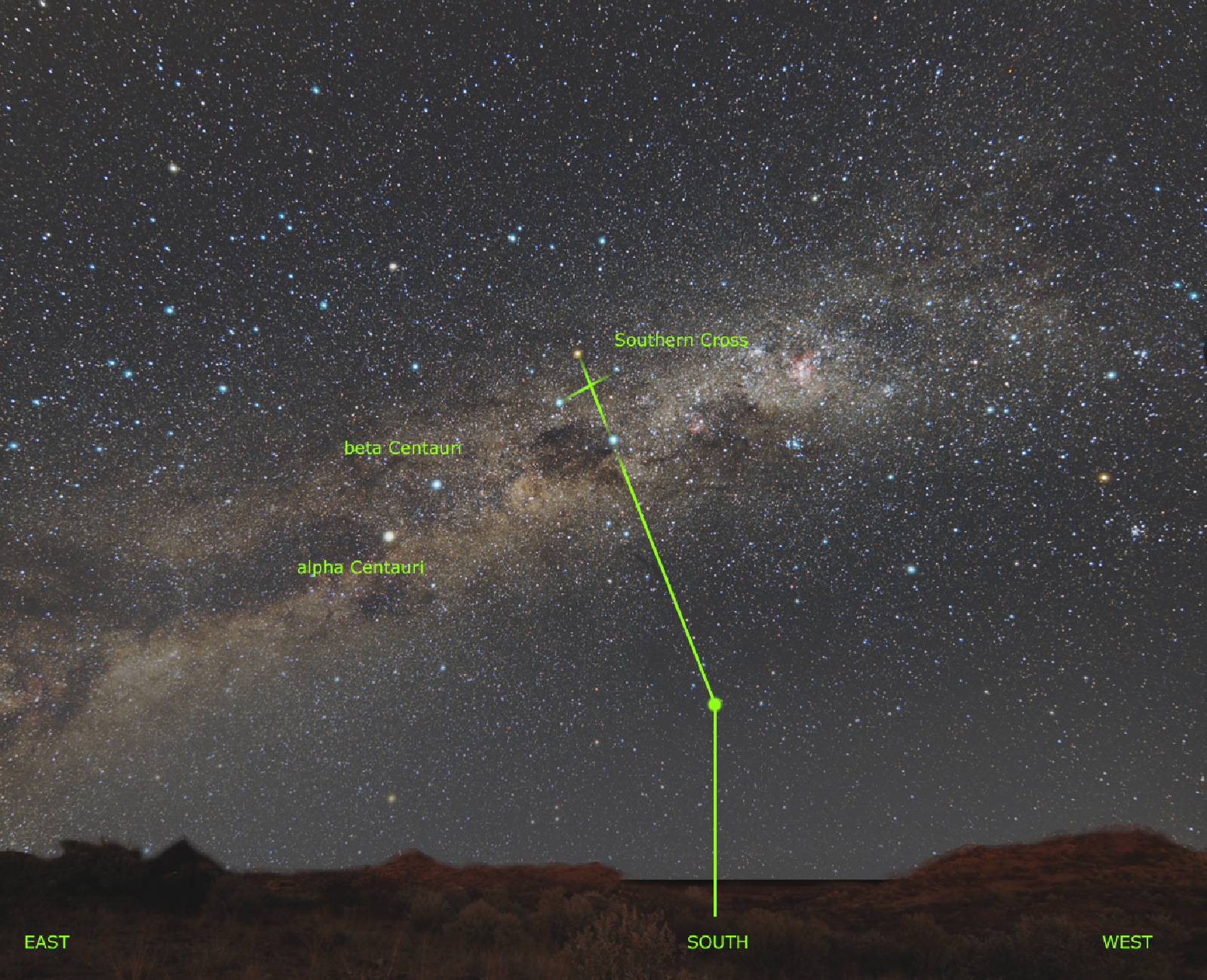
Wie schon oben im Text erwähnt gibt es am Südhimmel keinen hellen "Polarstern". So lässt sich der wahre Himmelspol nur ungenau bestimmen. Es gibt jedoch eine kleine Hilfestellung:
Lokalisieren Sie das Sternbild Kreuz des Südens. Als Hilfe dienen die beiden hellsten Sterne im Sternbild Centaurus, Alpa- und Beta Centauri. Im allgemeinen Sprachgebrauch nennt man sie auch die Weisersterne, im englischen Sprachgebrauch sind es die „the pointer stars“. Sie zeigen immer in Richtung auf das Kreuz des Südens.
Das Kreuz des Südens hat ja die Form eines normalen Kinderdrachens. Verlängern Sie (wie oben eingezeichnet) den Abstand der beiden am weitesten voneinander stehenden Sternen um die 5-fache Strecke. Dort liegt der südliche Himmelspol. Von dort fällen Sie ein Lot senkrecht zum Horizont. Genau dort liegt geografisch SÜDEN. Osten ist dann links, Westen rechts und Norden direkt hinter Ihnen.
Bevor man sich zum Kauf einer neuen Kamera entscheidet, sollte man sich dazu einige Gedanken machen und sich die folgenden Punkte überlegen
Vom Nutzer bevorzugte Beobachtungsobjekte,
monochrome Sensoren oder "single shot" RGB Sensoren?,
Gekühlte- oder ungekühlte Sensoren?,
die Wahl der Pixelgröße,
Bildfeld, Brennweite und Sensorgröße,
die Rechnerkapazität und
die Anschaffungskosten.
Wir geben im Folgenden zu den einzelnen Punkten einige Anregungen ...
1.) Die vom Nutzer bevorzugte Beobachtungsobjekte
Welche Objekte wollen Sie hauptsächlich fotografieren? Das ist das erste Kriterium zum Wahl einer astronomischen CMOS Kamera. Als Beobachtungsobjekte unterscheiden wir in diesem Text generell zwischen:
Sonnensystem, Sonne, Mond, Planeten, Kleinplaneten, Asteroiden und Kometen
Deep Sky Objekte wie großflächige Nebelgebiete, offene Sternhaufen und Kugelsternhaufen
Sonnensystem - Sonne, Mond und Planeten
Für die Aufnahmen aller Objekte bis auf Kleinplaneten und Kometen kommt heut zu Tage nur die Lucky Imaging Aufnahmetechnik in Frage. Hier werden in einer möglichst kurzen Zeitspanne bei guten Seeingbedingungen eine große Anzahl von sehr kurz belichteten Einzelbildern aufgenommen. Diese Bildsequenz, meist ein Videostream im .avi Datenformat, wird anschließend durch eine geeignete Software wie z.B. Autostakkert analysiert und die besten Einzelbilder zu einem finalen Rohsummenbild aufaddiert. Mit dieser Technik entstehen oft Bilder, die die theoretische Auflösung der Aufnahmeoptiken erreichen, teilweise sogar bei sehr guten optischen Systemen unterbieten. Was mit dieser Technik möglich ist zeigen Beispiele der Jupiteropposition 2019, die der Verfasser aufgenommen hat.
Da die Objekte hell sind, muss die Kamera nicht besonders empfindlich sein, also die Quanteneffizienz nicht besonders hoch sein. Planetenbilder sind im Primärfokus, selbst bei langen Aufnahmebrennweiten, klein, so dass auch die Sensorfläche nicht groß sein muss. Das einzige Kriterium ist hier die Übertragung einer möglichst hohen Bildrate und einer möglichst hohen Datentiefe von möglichst 14 Bit (Digitalisierung in 16.384 Grau- oder Farbstufen).
Sollen Planeten in sehr speziellen Spektralbereichen aufgenommen werden, z.B. die Venus im ultravioletten Licht oder die äußeren Gasplaneten im Methanbandbereich (ca. 900nm), sollte man sich die Kurve der Quanteneffektivität anschauen, ob der entsprechende Kamerasensor in diesen Spektralbereichen überhaupt noch empfindlich genug ist.
Soll die Kamera auch für die Aufnahme von großflächigen DeepSky Objekten eingesetzt werden, kann für hohe Bildraten auch die so genannte ROI Funktion eingesetzt werden, die die meisten Kameramodelle unterstützen. Dabei kann vom Nutzer ein kleiner Bildausschnitt der Pixelmatrix frei gewählt werden, der dann ebenfalls mit hoher Bildrate zum PC übertragen wird.
Für die Sonnen- und Mondfotografie sollte die Sensorfläche schon etwas größer (ab 1.280 x 960 Pixel) gewählt werden, ansonsten muss man Mosaikbilder erstellen, die aus mehreren Einzelbildern bestehen. Ansonsten gelten die oben beschriebenen Kriterien.
Was in der Mondfotografie mit preiswerten CMOS Bildsensoren und einem mittelgroßen Teleskop zum Beispiel möglich ist, zeigt ein fotografischer Mondatlas des Verfassers.
Zur Abschätzung der Bildfeldgröße in Abhängigkeit von Brennweite und Sensorgröße lesen Sie am Schluss den Abschnitt Bildfeld, Brennweite und Sensorgröße.
Sonnensystem - Kleinplaneten und Kometen
Sonderfälle sind sicher die Bebachtungsobjekte Kleinplaneten, Asteroiden und Kometen. Hier sollten die Sensoren schon deutlich empfindlicher sein, also eine hohe Quanteneffizienz haben. Auch sollten die Sensorfläche in etwa dem APS-C Format entsprechen. Sollen lichtschwache Asteroiden wie z.B. NEO´s oder so gar KBO´s und TBO´s fotografisch mit großen Teleskopöffnungen beobachtet werden, sollte höchstmögliche Quanteneffizienz angestrebt werden.
Ein Hauptgrund für die fotografische Beobachtung von Kleinplaneten und Asteroiden ist die Astrometrie (Positionsbestimmung) und die Messung von Helligkeiten (Photometrie) oder Helligkeitsänderungen. Für solche Beobachtungen empfehlen sich Kameras, die die Bilder mit großen Datentiefen auslesen, also mit mindestens 14 Bit, besser noch mit 16 Bit. Je größer die Datentiefe, desto differenzierter kann die Helligkeit eines Objekts gemessen werden.
Auch für die Erfassung von schwachen Strukturen in Kometenschweifen bei gleichzeitiger Darstellung der meist recht hellen Kernbereiche ist eine hohe Datentiefe (Bilddynamik) empfehlenswert.
Deep Sky Objekte, wie großflächige Nebelgebiete, offene- und Kugelsternhaufen
Sensorgrößen ab APS-C Format sind empfehlenswert. Hohe Quanteneffizienz ist erforderlich für die Aufnahmen von Nebelgebieten (speziell dann, wenn mit kurzen Belichtungszeiten im Sekundenbereich gearbeitet werden soll, DeepSky Lucky Imaging), geringere QE Werte für die Aufnahmen von Sternhaufen sind annehmbar.
Generelle Empfehlung: Werden hohe Bildfrequenzen, wie für die Lucky Imaging Technik benötigt, kommen NUR Kameras mit CMOS Sensoren in Frage. CCD Kameras erreichen diese hohen Bildübertragungsraten nicht. Für alle anderen Anwendungen kann der Nutzer entscheiden, ob er sich für eine CMOS- oder eine CCD Kamera wählt.
2.) Monochromer Sensor oder "single shot" RGB Sensor?
Das mit wichtigste Entscheidungskriterium für den Kauf einer astronomischen CMOS- oder CCD Kamera ist natürlich die Frage, ob monochrom (also Schwarz-weiß), farbig oder sowohl monochrom als auch farbig fotografiert werden soll.
Monochrome Sensoren bieten sich für das Lucky Imaging von Sonne und Mond an. Auch für die fotografische Beobachtung von Planeten in speziellen Spektralbereichen (wie z.B. Venus im ultravioletten Licht oder Jupiter im Methanband bei ca. 900nm Wellenlänge) und im nahen Infraroten Licht sind monochrome Sensoren die erste Wahl. Sie sollten für die Beobachtung in engen Spektralbereichen eine hohe Quanteneffizienz haben, denn die Filter sind sehr schmalbandig und lassen wenig Licht passieren.
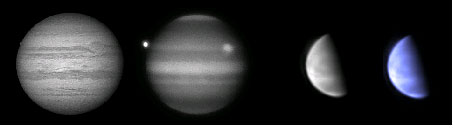
Jupiter im nahen Infrarot, Jupiter aufgenommen durch ein Methanbandfillter und die Venus im UV Spektralbereich
Bildbeispiele vom Verfasser zeigen von links nach rechts Jupiter im nahen Infrarot, Jupiter aufgenommen durch ein Methanbandfillter und die Venus im UV Spektralbereich (rechts außen das monochrome Bild koloriert)
Speziell beim Lucky Imaging vom Mond mit monochromen Sensoren, lässt sich zur Seeingberuhigung (Luftunruhe) ein IR Passfilter in den Strahlengang einsetzen, denn Seeingeffekte sind Wellenlängen abhängig und im nahen Infrarot (ca. 700 nm) deutlich geringer als im blauen Spektralbereich (450 nm).
Das gleiche gilt für die Lucky Imaging Fotografie der Sonne (im Weißlicht ebenfalls mit IR Passfilter, in anderen Spektralbereichen wie H-alpha oder im Kalziumlicht ohne IR Passfilter). Wer die Bilder gerne farbig hat, kann sie später in der Bildbearbeitung einfärben, es sind ja letztlich Aufnahmen in engen, monochromatischen (rot, violett) Spektralbereichen.
Ein MUSS für die Wahl eines monochromen Sensors ist die Fotografie von Nebelregionen mit Schmalbandfiltern (z.B. H-alpha, S-II, O-III). Bei dieser Art der fotografischen Beobachtungen können Farbsensoren nicht zum Einsatz kommen. Auch für die Positionsbestimmung und der Photometrie von Kleinplaneten, Asteroiden und Kometen sollte der monochrome Sensor die erste Wahl sein. Eine hohe Quanteneffizienz ist empfehlenswert, hohe Auslesebildfrequenzen sind nicht erforderlich. Für die Photometrie und die Astrometrie von Asteroiden ist eine präzise Zeitzuordnung zu den einzelnen Bildern erforderlich. Für Helligkeitsmessungen sind Sensoren mit Analog Digitalwandler von mindesten 14 Bit, besser 16 Bit empfehlenswert.
Für alle anderen Objekte der fotografischen Beobachtung (Lucky Imaging von Planeten, Nebeln, Galaxien und Sternhaufen sind "single shot" RGB Sensoren eine gute Wahl, egal ob CMOS oder CCD. Man kann natürlich auch mit monochromen Sensoren aufnahmen erzeugen, indem Bilder separat durch je ein rotes-, grünes- und blaues Filter aufgenommen werden und in der folgenden Bildbearbeitung zu einem RGB oder L(Luminanz)-RGB zusammen gesetzt wird. Dazu benötigt man dann aber zusätzlich ein Filterrad, die entsprechenden Filter und letztlich die 3-fache Beobachtungszeit für die Aufnahme eines einzelnen Objekts. Und natürlich steigt die Höhe der Anschaffungskosten
Die Lucky Imaging Planetenfotografie mit monochromen Sensoren und separater RGB Filterung liefert bessere Bildergebnisse, als Aufnahmen die mit "single shot" Farbsensoren aufgenommen wurden, denn die RGB Filtermatrix über den Fotodioden reduziert die Bildauflösung. Diese Methode erfordert aber außerordentlich gute Seeingbedingungen am Beobachtungsort des Nutzers, die wahrscheinlich bei den wenigsten Anwendern gegeben sind.
Der Bildberabeitungsaufwand ist deutlich höher, aber dieses Verfahren liefert "High End" Bildergebnisse.
3.) Gekühlter- oder ungekühlter Sensor?
Die Frage ist eigentlich schnell beantwortet, egal ob es sich um monochrome-, "single shot"- CMOS oder CCD Kameras handelt. Soll mit kurzen Belichtungszeiten im Bereich von bis zu einigen Sekunden gearbeitet werden (z.B. Sonnensystem Lucky Imaging, Deep Sky Lucky Imaging, Guiding), kann eine ungekühlte Kamera gewählt werden. Je kleiner das Ausleserauschen der Kamera ist, desto rauschärmer werden die Rohbilder sein.
Soll mit längeren Belichtungszeiten gearbeitet werden, steigt das Wärmerauschen der Sensoren steil und ein ungekühlter Sensor ist nicht mehr empfehlenswert. Eine Kühlung des Sensors hält das Wärmerauschen in Grenzen.
Für den Einsatz aller Beobachtungen, die eine Bildauswertung, z.B. die Messung von Helligkeiten, der Astrometrie, oder anderer wissenschaftlichen Zielen dienen soll, sollten nur gekühlte Sensoren eingesetzt werden.
4.) Die Wahl der Pixelgröße
Einer der wichtigsten Faktoren bei der Wahl einer geeigneten CMOS- oder CCD Astrokamera ist die Pixelgröße, denn diese sollte für optimale Bildergebnisse an die Aufnahmebrennweite angepasst sein. Das wird in der Terminologie von CCD- und CMOS Sensoren auch als Sampling bezeichnet. Ein gut gewähltes Sampling bedeutet in der Praxis, dass der Aufnahmesensor mit maximaler Empfindlichkeit und höchster Bildauflösung an einer vorgegebene Brennweite betrieben wird.
Die Brennweite des Aufnahmeteleskops beeinflusst (neben den Seeingbedingungen) die Größe der Abbildung eines Sterns auf der Sensormatrix. Eine lange Brennweite verteilt das Beugungsbild eines Sterns über eine größere Anzahl von Einzelpixel als bei einer kürzeren Brennweite. Sind die Pixel des Sensors relativ groß, bedeutet eine lange Brennweite keine Einschränkung in der Empfindlichkeit, denn jedes einzelne Pixel empfängt noch ausreichen Licht. Exakt lässt sich die Pixelgröße, bzw. die Länge der Aufnahmebrennweite über das so genannte Nyquist Abtasttheorem berechnen.
Abschätzen lässt sich das Nyquist Kriterium über eine Faustformel. Als ideal gilt es, wenn die Sternabbildung über drei bis vier Pixel verteilt wird. Wird der Stern aufgrund einer zu kurzen Brennweite auf weniger oder sogar nur auf 1 Pixel (wird in der Praxis wegen des Seeings nicht vorkommen) konzentriert spricht man von "Undersampling". Wird das Sternbild auf eine viel größere Fläche von mehr als 4 Pixel verteilt, spricht man von Oversampling. Den Mittelweg nennt man ein gutes- oder optimales Sampling. Ein Undersampling sollte in der DeepSky Fotografie auf jedem Fall vermieden werden.
Undersampling (links), optimalem sampling (mitte) und rechts das Oversampling.
Das Bild links zeigt anhand von Sternabbildungen ein Beispiel für Undersampling (links), optimalem sampling (mitte) und rechts das Oversampling.
Der Abbildungsmaßstab in Abhängigkeit von der Pixelgröße und der Aufnahmebrennweite berechnet sich näherungsweise wie folgt:
[br]wobei "/Pixel der Sterndurchmesser (in Bogensekunden pro Pixel), a die Kantenlänge des Pixels (ebenfalls in mm) und f die Aufnahmebrennweite (in mm) ist.
Ein Beispiel:
Ein Sensorpixel mit einer Kantenlänge von 5µm (= 0.005 mm) ergibt bei einer Aufnahmebrennweite von f = 1.000 mm einen Beugungsbilddurchmesser des Sterns von ca. 1 Bogensekunde. Das entspräche, dass bei guten Seeingbedingungen, sich das Sternbild auf 1 Pixel konzentriert und das ist wäre ein klassisches Beispiel für Undersampling.
Im diesem Beispiel wäre also eine Kamera mit Pixelgrößen von 10µm oder größer zu wählen, oder die Aufnahmebrennweite zu verdoppeln oder zu verdreifachen.
Wie man dem ganzen entnehmen kann ist das ganze mehr theoretischer Natur oder gilt nur für extrem kurz belichtete Bilder, wie sie allgemein in der Lucky Imaging Sonnen-, Mond- und Planetenfotografie eingesetzt werden, denn das Seeing wird bei längerer Belichtungszeit die 1 Bogensekunde des Beugungsbildes um den Faktor 2 oder 3 über die Pixelmatrix verschmieren und dann wäre das obige Beispiel eine ganz gute Wahl zwischen Pixelgröße und Aufnahmebrennweite. Generell sollte man so eine Abschätzung von Brennweite und Pixelgröße vor dem Kauf einer Kamera zumindest überschlagen. So wäre eine Kamera mit einer Pixelgröße von 5- bis 6µm und einer Brennweite von 1.000 bis 1.200 mm eine ganz gute Wahl.
Es gibt einige CMOS Kameras, die ein so genanntes Pixelbinning ermöglichen. Dabei werden Sensorintern mehrere Pixel zu einem größeren Pixel zusammen gefasst. Normalerweise wird eine Matrix von 2 x 2 (entsprechend 4 Pixel) oder 3 x 3 (entsprechend 9 Pixel) erstellt. Solche Sensoren sind natürlich entsprechend flexibel, um die Pixelgröße an eine gegebene Aufnahmebrennweite anzupassen. Bei CCD Sensoren ist das Pixelbinning eigentlich eine Standardfunktion
5.) Bildfeld, Aufnahmebrennweite und Sensorgröße
Eine weitere, wichtige Kenngröße zur Auswahl eines Kamerasensors ist das abgebildete Gesichtsfeld in Abhängigkeit von der Sensorgröße und der Aufnahmebrennweite. Soll die Kamera z.B. nur für die Lucky Imaging Planetenfotografie eingesetzt werden, kann ein kleines, leichtes (ungekühltes) Kameramodell und kleinem Pixelarray gewählt werden. Lucky Imaging für die Sonnen- und Mondfotografie erfordern mittelgroße Sensoren und die DeepSky Fotografie großflächiger Nebelregionen erfordern große Bildsensoren, es sei denn man montiert mehrere Einzelbildern zu Mosaiken.
Die Größe des Bildfeldes in Abhängigkeit von Sensorgröße und der Aufnahmebrennweite kann näherungsweise nach folgender Formel berechnet werden.
Dividiert man den errechneten Wert durch 60 ergibt sich das Bildfeld in Bogenminuten, dividiert man durch 3.600 ergibt das die Bildfeldgröße in Grad.
6.) Die Rechnerkapazität
Ein oft unterschätzter Punkt ist die vorhandene Festplattenkapazität, die Schnelligkeit des Prozessors und die Schnittstellen des Rechners. Im folgenden eine grobe Abschätzung:
Lucky Imaging Sonnensystem:
eine schnelle USB 3.0 Schnittstelle ist empfehlenswert. Ein Videostream von 2.000 Einzelbildern bei einer Sensorgröße von 1.280 x 960 Pixel (z.B. Sonne, Mond) und einer Datentiefe von 12 Bit belegt auf der Festplatte knapp 1 Gb. Bei einer hohen Bildfrequenz und sehr guten Seeingbedingungen muss die interne Festplatte ca. 100- bis 200 Gb abspeichern können. Eine externe USB 3.0 Festplatte ist zu vermeiden, die interne Festplatte unterstützt hohe Datenraten oft schneller als eine externe Platte.
Deeps Sky:
Ein Einzelbild mit einer Datentiefe von 14 Bit im APS-C Sensorformat und kleinen Pixelgrößen belegt als RAW Datei ca. 30 bis 50 Mb Speicherplatz auf der Festplatte. Arbeitet man mit der Lucky Imaging DeepSky Fotografie fallen bei Belichtungszeiten von z.B. 5 Sekunden und der Aufnahme von 1.000 Bildern ebenfalls große Datenmengen an.
7.) Die Kosten
Abschließend spielt natürlich für die Auswahl zum Kauf einer CMOS- oder CCD Kamera auch der Kaufpreis auch eine große Rolle. Wie viel Geld ist man bereit anzulegen, bzw. wie viel Geld ist für das Hobby übrig? Das muss nun jeder für sich selbst entscheiden, da kann an dieser Stelle keine Hilfestellung gegeben werden.
Nur soviel sei aus der Sicht des Verfassers noch angemerkt: Es ist wie bei vielen Hightech Geräten in heutiger Zeit wie Smartphones, Tablets oder Laptops: Kaufen Sie heute eine astronomische CMOS- oder CCD Kamera, können Sie sicher sein, dass Sie ein Jahr später ein besseres Produkt zu einem geringerem Kaufpreis bekommen können.
Die Abkürzung ADU steht für Analog-Digital-Unit (Analog-Digital-Einheit) und ist ein dimensionsloser Wert. Im Prinzip steht ein hoher ADU Wert für große Objekthelligkeit und ein kleiner ADU Wert für ein sehr lichtschwaches Objekt. In Histogrammen von astronomischen Bildern wird der ADU Wert auf der waagerechten Achse aufgetragen. Im Prinzip könnte man den ADU Wert einer CCD Aufnahme am besten mit dem Schwärzungswert eines Filmkorns vergleichen. Ein helles Objekt ergibt eine hohe Schwärzung, ein lichtschwaches Objekt ergibt wenig Schwärzung des Filmkorns.
Ein Nachteil von digitalen CMOS Kameras der ersten Generationen war das so genannte Ausleseglühen des Verstärkers bei Langzeitbelichtungen. Es erzeugt eine ungleichmäßige Aufhellung am Bildrand und war bei Aufnahme von "pretty DeepSky pictures" mit normaler Bildverarbeitung nur schwer oder gar nicht zu eliminieren. AMP Glow tritt bei CCD Sensoren nicht auf.
Dabei handelt es sich um Streulicht, das von den On-Chip-Verstärkern (bei einem CMOS Sensor hat jedes Pixel seinen eigenen Verstärker) verursacht wird. Alle Fotodioden, die - zwangsläufig - unter einer Vorspannung stehen, erzeugen eine geringe Lichtmenge durch den gleichen physikalischen Prozess, der auch eine LED leuchten lässt. Amp Glow spielt bei CMOS Sensoren der heutigen Generation keine Rolle mehr und wird durch Soft- und Hardware Lösungen verhindert.
Bezeichnet die Summe aller (störenden) Rauschanteile eines Bildes, die im Sensor und in der Sensorelektronik durch physikalische Effekte erzeugt werden und das Signal des Beobachtungsobjekt überdecken. Die Maßeinheit ist Elektronen (e-). Je kleiner der Wert, desto geringer das Ausleserauschen. Siehe dazu auch den Punkt Dunkelrauschen.
In den lichtempfindlichen Fotodioden des Pixelarrays werden Photonen aufsummiert und in eine elektrische Spannung umgewandelt. Je mehr Photonen in einem Pixel gesammelt sind, desto höher ist der Spannungswert. Diese elektrische Spannung ist ein analoger Wert und kann kontinuierlich beliebige Werte annehmen. Da ein Computer aber nur mit digitalen Daten arbeitet kann, wandelt ein elektronisches Bauteil - der so genannte Analog Digital Konverter - das analoge Spannungssignal in einen abgestuften, digitalen Wert mit einer entsprechenden Datentiefe um (siehe auch den Begriff Bittiefe, Datentiefe). Der AD Wandler ist, neben dem Sensor selbst, eines der wichtigsten elektronischen Bauteile in der Kameraelektronik.
Teure, wissenschaftliche Kameras arbeiten mit 2 ADW´s parallel und mitteln den digitalen Wert der Ausgabe (double correlated sampling).
Dies sind Begriffe, die hauptsächlich in den technischen Daten von QHY CMOS Kameras zu finden sind.
Anti Noise: Bezeichnet elektronische Lösungen, um das Störrauschen (Nosie) im Rohbild zu minimieren.
Anti Dew: Bezeichnet technische Maßnahmen, um einen Taubeschlag (Dew) im Eintrittsfenster vor dem Sensor, der ja meist eine weit niedrigere Temperatur als die Umgebungstemperatur hat, zu verhindern. Im allgemeinen sind dies eine luftdicht versiegelte Kammer in der der Sensor liegt und eine Beheizung des Eintrittsfensters.
Anti Amp Glow: Bezeichnet elektronische- und technische Maßnahmen zur Eliminierung des Verstärker Auslöseglühens der CMOS Sensoren zu verhindern.
Bezeichnet die Anzahl der Grau- oder Farbabstufungen, die ein Analog Digitalwandler für einzelne jedes Pixel zur Verfügung stellt. In der Digitaltechnik ist 1 Bit die kleinste Informationseinheit, die nur zwei Zustände haben kann: 0 und 1 (in der digitalen Fotografie 0 = weiß und 1 = schwarz). Würde man ein Bild nur mit einer Datentiefe digitalisieren, hätte man ein rein schwarz-weißes Bild ohne jede Graustufen.
Die gängigsten Datentiefen bei der Digitalisierung astronomischer Bilder sind:
08 Bit = 256 Graustufen (eigentlich nur noch für reine Guidingkameras)
12 Bit = 4096 Graustufen (Lucky Imaging)
14 Bit = 16.384 (Lucky Imaging, Deep Sky) und
16 Bit = 65.536 (maximale Datentiefe, DeepSky und wisschenschaftliche Kameras)
Das menschliche Auge kann nur 50 bis 100 Helligkeitswerte oder Farb/Graustufen unterscheiden und auch ein Standard Computermonitor kann nur Bilder von 8 Bit Datentiefe darstellen (spezielle Monitore in der medizinischen Bildgeben stellen auch 10 Bit Bilder dar), wozu also der Aufwand einer hohen Datentiefe?
Wenn Bilder bearbeitet werden sollen, um z.B. den Kontrast zu erhöhen oder Helligkeiten anzupassen, fehlen sehr schnell Bildinformationen. Das zeigt sich durch „Löcher“ im Histogramm. Eine wichtige Rolle spielt die Bittiefe spätestens bei einer Bildverarbeitung mit der Messung von Signalen, z.B. Photometrie und/oder Astrometrie oder bei einer Bildausgabe über einen Drucker mit Fotoqualität. Unter dieser URL "8-bit, 16-Bit, 32-Bit : was die Bit-Tiefe für Fotografen bedeutet" findet man eine schöne Übersicht mit Bildbeispielen zur Datentiefe.
Abkürzungen für die generelle Bauweise eines CMOS- oder CCD Sensors. FSI steht für Front-Side-Illuminated und BSI für Back-Side-Illuminated Sensoren. BSI Sensoren erreichen auf Grund ihrer Konstruktion höhere Empfindlichkeiten (Quanteneffizienz) als FSI Sensoren. BSI Kameras sind aus diesem Grund auch teurer als Kameras mit einem FSI Bildsensor. BSI Sensoren erreichen Quanteneffizienszwerte von über 90%, FSI Sensoren grob zwischen 60 bis 75% (siehe auch den Punkt Quanteneffiziens).
Bezeichnet die maximale Anzahl von Einzelbilder pro Sekunde (frs = frames per second), die eine Kamera mit einer definierten Datentiefe und einer bestimmten Sensorgröße (Anzahl der Einzelpixel) an den PC übertragen kann. Hier gilt: Je kleiner die Gesamtanzahl der Pixel desto höher die Bildfrequenz. Die Bildfrequenz spielt nur bei CMOS Kameras eine Rolle, denn die Bildrate bei CCD Sensoren liegt aufgrund dem Auslesenodus bei einem Bild in mehreren Sekunden. CMOS Sensoren können bis zu einigen hundert Bilder pro Sekunde auslesen.
Der Begriff Blooming betrifft eigentlich nur Sensoren der CCD Technologie. Ein einzelnes Pixel ist, wenn es eine bestimmte Anzahl Photonen eingesammelt hat (Full Well Kapazität), "gesättigt" ist, d.h. es kann keine Photonen mehr aufnehmen (Analogie: Stellen Sie sich die Photodiode als Eimer vor und die Lichtphotonen als Regentropfen. Irgendwann ist der Eimer voll und das Wasser fließt über).
Die überzähligen, weiter einfallenden, Photonen "fließen" auf die Nachbarpixel über und helle Sterne zeigen hässliche Lichtstreifen. Der Effekt kann bei der Herstellung des Chips durch das Einbringen eines so genanntes "Anti Blooming Gates" zwischen den einzelnen Pixeln verhindert werden. Das Gate sorgt dafür, dass die elektrischen Ladungen vor den Nachbarpixeln abgeleitet werden.
Dieses Sperrgitter hat jedoch einen Nachteil: es reduziert die Pixelgröße und damit auch die Empfindlichkeit des Sensor
Es gibt einige CMOS Kameras, die ein so genanntes Pixelbinning ermöglichen. Dabei werden Sensorintern mehrere Pixel zu einem größeren Pixel zusammen gefasst. Normalerweise wird eine Matrix von 2 x 2 (entsprechend 4 Pixel) oder 3 x 3 (entsprechend 9 Pixel) erstellt. Solche Sensoren sind natürlich entsprechend flexibel, um die Pixelgröße an eine gegebene Aufnahmebrennweite anzupassen. Bei CCD Sensoren ergibt sich zusätzlich eine Empfindlichkeitssteigung weil sich die Fläche der gebinnten Pixel signifikant vergrößert. Eine detaillierte Beschreibung mit Beispielabbildungen finden Sie unter http://www.sbig.de/universitaet/glossar-htm/binning.htm
Alle CMOS und CCD Sensoren können durch den Herstellungsprozess Fehlstellen aufweisen. Es sind einzelne "hot'', bzw. "cool'' Pixel, inaktive Pixel oder ganze Zeilendefekte. Chipklassen sind normiert und die Fehler sind definiert als maximale Pixeldefekte, Clusterdefekte und inaktive Zeilen. Es gibt die Klassen 0 (fehlerfrei), 1 und 2. Bei sehr wenigen und hochwertigen CMOS- und CCD Kameras kann bei einem Kauf die Chipklasse gewählt werden. Dies kommt aber hauptsächlich für wissenschaftliche Kameras in Betracht.
Jeder CMOS- oder CCD Sensor erzeugt ein so genanntes thermisches Eigenrauschen (Dunkelstrom). Das bedeutet, dass sich in der einzelnen Photodiode auch ohne Lichteinfall, einfach durch Wärme, Elektronen bilden, die sich mit den Elektronen, die durch Lichteinfall von Photonen entstehen, vermischen.
Dieser Dunkelstrom wird in Anzahl von Elektronen pro Sekunde bei einer bestimmten Temperatur angegeben und hat bei unterschiedlichen Sensoren durchaus signifikant unterschiedliche Werte. Hierbei gilt generell: Je größer die einzelnen Pixel sind, desto höher ist der Dunkelstrom. Da der Dunkelstrom durch Wärme erzeugt wird, kann er durch Kühlung des Sensors reduziert werde. Es gilt, je geringer der Dunkelstrom, desto geringer das auch Dunkelrauschen.
Das Dunkelrauschen kann durch den Abzug eines so genannten Dunkelbildes vom Bild des Aufnahmeobjekts (Hellbild) korrigiert werden. Ein Dunkelbild ist ein Bild von gleicher Belichtungszeit und Temperatur, welches bei einem lichtdicht abgedecktem Sensor aufgenommen wurde.
Das Flatfieldbild dient ebenfalls zur Rohbildkorrektur, genauso wie das Dunkelbild. Hier werden jedoch optische Fehler korrigiert, wie z.B. eine Bildvignettierung (ungleichmäßiger Bildhintergrund) und/oder Schmutz, Staub oder Fusseln, die sich in der Bildebene mit abbilden. Sollen auf einem Bild Helligkeiten gemessen werden (Photometrie) so sind Dunkel- und Flatfieldbilder ein Muss.
Das Flatfieldbild wird vom Rohbild nach der Dunkelbildkorrektur angebracht, also Rohbild - Dunkelbild - Flatfieldbild.
Flatfieldbilder werden gegen einen hellen, diffusen Hintergrund aufgenommen. Sie sind nicht einfach zu erzeugen. Die Kamera muss in exakt der Position am Teleskop sitzen, wie während der Aufnahme des Rohbildes, da ansonsten die Bildinformationen zwischen Flat- und Rohbild verschoben sind. Flatfieldbilder müssen nicht bei gleicher Temperatur oder Belichtungszeit aufgenommen werden. Die Belichtungszeiten werden so angepasst, dass die Pixel etwa zu 30 - 50% gesättigt.
Man kann Flatfieldbilder gegen einen Dämmerungshimmel - am besten im Zenit - oder durch eine künstliche Beleuchtung (Flatfieldfolien) aufnehmen. Für Dämmerungsflats muss die Teleskopöffnung mit einer weißen opaken Plexiglascheibe abgedeckt werden, um eine möglichst gleichmäßige Ausleuchtung zu erzeugen.
Der Wert gibt die maximale Anzahl an Elektronen an, die ein Pixel aufnehmen kann, bevor es in die Sättigung geht. Danach ist das Pixel "voll". Die Maßeinheit sind Anzahl Elektronen (e-).
Übliche Werte liegen zwischen 20.000- und ca. 400.000 e-. Somit ist dieser Wert auch ein Faktor für die Empfindlichkeit der Kamera. Die Full Well Kapazität ist meist direkt proportional zur geometrischen Pixelabmessung, d.h. große Pixelabmessungen haben eine hohe Full Well Kapazität, kleine Pixeldimensionen ergeben niedrige Werte für die Full Well Kapazität. Je höher der Wert, desto empfindlicher ist der Sensor und umso höher kann die Bilddynamik sein.
Der Begriff bezeichnet ein regelmäßiges, wiederkehrendes Rauschmuster. Die Elektronik einiger Kameras kann solche Muster erkennen und das Rohbild entsprechend korrigieren.
Gain, Verstärkung (dieser Begriff gilt ausschließlich für CMOS Kameras)
Bei CMOS Sensoren lässt sich eine elektronische Bildverstärkung einstellen. Der Gain Faktor ist eine der wichtigsten Parameter zur Steuerung einer CMOS Kamera. Er beeinflusst aber zwei der wichtigsten Bildparameter, die Full Well Kapazität und das Ausleserauschen der Kamera.
Bei einer niedrigen Verstärkung ist die Full Well Kapazität hoch, die Pixel können dann mehr Elektronen aufnehmen (große Empfindlichkeit und Dynamik) als bei einem höheren Gain Faktor. Gleichzeitig ist leider das Ausleserauschen hoch. Erhöht man die Verstärkung (Gain Wert hoch) sinkt die Full Well Kapazität (die Pixel sind schneller gesättigt) aber das Ausleserauschen sinkt.
Generell kann man sagen, dass niedrige Einstellungen der Verstärkung für Langzeitbelichtungen empfehlenswert sind, wogegen eine hohe Verstärkung besser für Kurzzeitbelichtungen mit einer hohen Anzahl kurz belichteter Einzelbilder ist (Lucky Imaging).
Da der Einfluss der Verstärkung auf Rauschen und Full Well stark Sensorabhängig ist, muss man sich als Nutzer die Kurven von Gaineinstellung, Full Well und Ausleserauschen der Hersteller anschauen, um eigene Anwendungen einen optimalen Wert für die Verstärkung zu bestimmen.
Jeder Bildsensor erzeugt ein so genanntes thermisches Rauschen oder Dunkelstrom ( dark nosie). Das bedeutet, dass sich im Pixel auch ohne Lichteinfall, einfach durch Wärme, Elektronen bilden, die sich mit den Elektronen der eigentlichen Bildinformation vermischen.
In vielen Kameras werden die CMOS und/oder CCD Sensoren deshalb gekühlt. Die Abkürzung TE bezeichnet hier eine thermoelektrische Kühlung, meist über Peltier Elemente. Die maximale Kühlleistung wird in Grad Celsius unter die Umgebungstemperatur angegeben. Gängige Werte der TE-Kühlung liegen zwischen 30 bis 40 Grad unter die Umgebungstemperatur. Hochwertige Kameras bieten zusätzlich die Möglichkeit einer Wasserkühlung, die den Sensor noch tiefer kühlen kann.
Die Kühlung reduziert das thermische Rauschen pro 7 Grad Celsius auf ca. auf die Hälfte.
Lucky Imaging bezeichnet eine Aufnahmetechnik, die aus dem Bereich der Speckle Interferometrie stammt. Bei dieser Methode werden - speziell in der Mond- und Planetenfotografie - in Momenten guter Seeingebdingungen hunderte bis tausende von sehr kurz belichteten Einzelbilder meist als Videostream aufgenommen. Diese Einzelbilder sind sehr kontrastarm und verrauscht und werden anschließend von einer geeigneten Bildauswertesoftware analysiert, zum Beispiel "Autostakkert" (www.autostakkert.com).
Nach der Analyse der einzelnen Rohbilder wird eine frei wählbare Anzahl der qualitativ besten Rohbilder zu einem rauscharmen Summenbild aufaddiert. Mit dieser Technik gelingen Mond- und Planetenaufnahmen, die die theoretische Auflösung des Aufnahmeteleskops erreichen.
Beim Mikrolensing wird jedem Pixel eine halbkugelförmige Linse vorgeschaltet, die dafür sorgt dass auch seitlich einfallende Photonen gebündelt werden und damit die Quanteneffektivität (Empfindlichkeit) des Sensors erheblich angehoben wird. Mikrolensing funktioniert besonders effektiv bei Wellenlängen kleiner 600 Nanometer.
Pixel ist ein Kunstwort, entstanden aus den englischen Wörten Picture und element. Das Einzelpixel eines Bildsensors ist ein einzelnes Bildelement mit einer bestimmten geometrischen Abmessung (meist quadratisch), die allgemein in der Maßeinheit µm (Millionstel Meter) angegeben wird (1 µm entspricht 1/1000mm, ein 5 µm Pixel entspricht einer Kantenlänge von 0.005 mm). Die Pixel sind in horizontalen und vertikalen Zeilen und Spalten angeordnet. Alle zusammen ergeben dann die Matrix des Sensors.
Das Pixel ist ein elektronisches Halbleiterbauteil (eine Photodiode/Phototransistor), das einfallende Photonen aufsummiert und in eine adäquate elektrische Ladung umwandelt. Die elektrische Ladung wird nach dem Ende der Belichtung einer Auswerteelektronik zugeführt (Analog Digital Wandler), die der Höhe der analogen elektrischen Ladung einen digitalen Helligkeitswert zuordnet (genauer einen bestimmten Farb- oder Grauwert). Da die Auswerteelektronik die geometrische Position des Pixels im Array "kennt" wird die Graustufe natürlich einer bestimmten Position innerhalb des Bildes zugeordnet.
Der Wert der Quanteneffektivität ist eine Angabe zur Empfindlichkeit eines Bildsensors. Er wird in Tabellenform oder als Graphik vom Hersteller zur Verfügung gestellt. Die Quanteneffizienz ist Wellenlängen abhängig und der maximale Wert kann nur für einen eng begrenzten Wellenlängenbereich gelten.
Die Quanteneffizienz wird in Prozent angegeben. Eine Quanteneffizienz von 100% bedeutet, das JEDES einfallende Photon eine elektrische Ladung auslöst. Eine Quanteneffizienz von 50% bedeutet, dass nur jedes 2. Photon und eine QE von 25% nur jedes 4 Photon eine elektrische Ladung erzeugt.
Pixel monochromer Sensoren lassen sich in einem weiter Bereich der Wellenlänge maximieren (von ultraviolett bis Infrarot). Bei CCD Sensoren wird meist auf eine hohe QE im H-alpha Spektralbereich (656 nm) gesetzt. Auf Grund des Basismaterials von CMOS Sensoren haben die Pixel eine hohe QE im grünen (530 bis 550 nm) Spektralbereich.
Bei Farbsensoren wird die RGB Farbfiltermatrix normalerweise so konzipiert, dass die Kamera bei Tageslicht möglichst farbgetreue Bilder liefert.
Das Rohbild (RAW Image), welches aus der Kamera ausgelesen wird, ist die Basis für die folgende Bildbearbeitung. Ein Rohbild besteht unter anderem aus den folgenden - sich teilweise vermischenden - Störkomponenten:
das Bildsignal, das Signal des Aufnahmeobjektes. Elektronen werden durch Photonen des Aufnahmeobjekts in der Photodiode erzeugt
das Biasignal, Grundstörrauschen der kompletten Kamera- und Steuerelektronik
das Wärmerauschen, Elektronen werden - ohne Einfall von Photonen - durch Wärmebewegung erzeugt
Weiterhin können im Rohbild folgende Störfaktoren enthalten sein
Photonenrauschen, unregelmäßige Schwankungen des Photonensignals. Die Rate der eintreffenden Photonen ist nicht konstant
Wärmerauschen, statistische Schwankungen der Erzeugung von Elektronen ohne Photonen durch Wärmebewegung, ist ebenfalls nicht konstant
Ausleserauschen, Fehler in der Auswerteelektronik
Digitalisierungsrauschen, Fehler bei der Digitalisierung des Signals durch den Analog Digital Wandler
Empfindlichkeitsschwankungen, die Empfindlichkeit der einzelnen Pixel variiert. Aktuelle gute Sensoren haben weniger als 1% Differenz zwischen benachbarten Pixeln und sie sind kleiner als 5% über die gesamte Sensormatrix
Korrekturmöglichkeiten der einzelnen Fehlerquellen:
Das Auslese- und das Digitalisierungsrauschen können vom Anwender nicht korrigiert werden. Hier kann nur der Kamerahersteller durch eine saubere Konstruktion und hochwertige elektronische Bauteile für möglichst niedrige Werte sorgen. Wärmerauschen kann durch die eine geregelte, möglichst tiefe Kühlung des Sensors unter die Umgebungstemperatur minimiert und durch den Abzug eines Dunkelbildes entfernt werden. Die Empfindlichkeitsschwankungen können durch gute Flatfieldbilder vom Nutzer korrigiert werden. Das Biassignal wird häufig bereits Kameraintern korrigiert.
Die Abkürzung ROI ist englischsprachig und bedeutet Region Of Interest ("Ausschnitt von Interesse"). Bei fast allen astronomischen CMOS Kameramodellen lässt sich vom Nutzer ein beliebiger Bildausschnitt aus dem Gesamtfeld der Sensorfläche auswählen. Das macht z.B. Sinn, wenn man beim Lucky Imaging von Planetenaufnahmen die ausgelesene Sensorfläche einzugrenzen, denn je kleiner das Pixelarray ist, desto schneller ist die Bildübertragungsfrequenz.
Sampling bezeichnet einen Begriff, um die Aufnahmebrennweite optimal an die Größe eines Pixels anzupassen. Man spricht hier von Undersampling, vom Oversampling und von einem angepasstem- oder optimalen Sampling.
Dies bezeichnet die Datenschnittstelle der Kamera, über die die Bilder an einen PC übertragen werden. Je mehr Bits pro Zeiteinheit an den Rechner übertragen werden können, desto höher ist die Bildübertragungsfrequenz. USB 2.0 (ca. 500 Mbit/s) ist in heutiger Zeit als langsam einzustufen, USB 3.0 ist mit ca. 10 Gbit/s deutlich schneller und Glasfaser Gigabit-E (je nach Typ bis zu einigen hundert GBit/s) ist heut zu Tage die schnellste Schnittstelle. Um die Geschwindigkeiten zu realisieren, muss natürlich der PC ebenfalls über eine entsprechende Schnittstelle verfügen. USB 3.0 ist abwärtskompatibel zu USB 2.0.
Moderne CMOS- und CCD Kameras haben keinen mechanischen Verschluss, wie sie früher in fotografischen Kameras eingesetzt wurden.
In modernen CMOS- und CCD Kameras werden elektronische Verschlüsse eingesetzt, die die Belichtung beginnen und auch beenden.
CCD Sensoren verwenden häufig einen so genannten "Global-Shutter", die Belichtung aller Pixel beginnt und endet zum selben Zeitpunkt und anschließend wird das Bild zum PC übertragen.
Gängige CMOS Sensoren verwenden stattdessen ein so genanntes "Rolling Shutter" Konzept. Hierbei werden die Sensorzeilen zu unterschiedlichen Zeiten dem Licht ausgesetzt, das abzubildende Objekt zeilenweise erfasst und die Zeilen noch während der Belichtung ausgelesen. Das Resultat ist ein sehr schneller Belichtungsvorgang und daraus folgt auch eine hohe Datentransferrate.
Signal to Noise bedeutet in Deutsch Signal Rausch Verhältnis und die Angabe ist wie der Wert ADU Wert eine dimensionslose Angabe. Je höher der SNR (manchmal auch nur SN) Wert, desto höher ist die Rohbildqualität.
Beispiel: Signal = 1000, Noise = 50, dann ist S/N = 1000/50 = 20. Ein hoher Wert für das Signal-Rausch Verhältnis bedeutet auch einen hohen ADU Wert, die Dynamik des Bildes ist hoch und bedeutet und es enthält viele verschiedene Farb- oder Grauabstufen.
Für alle hier kurz beschriebenen Begriffe viele weitere finden Sie unter folgender URL http://www.sbig.de/universitaet/htm/glossar.htm ausführlichere Beschreibungen, erweitert mit entsprechenden Abbildungen.
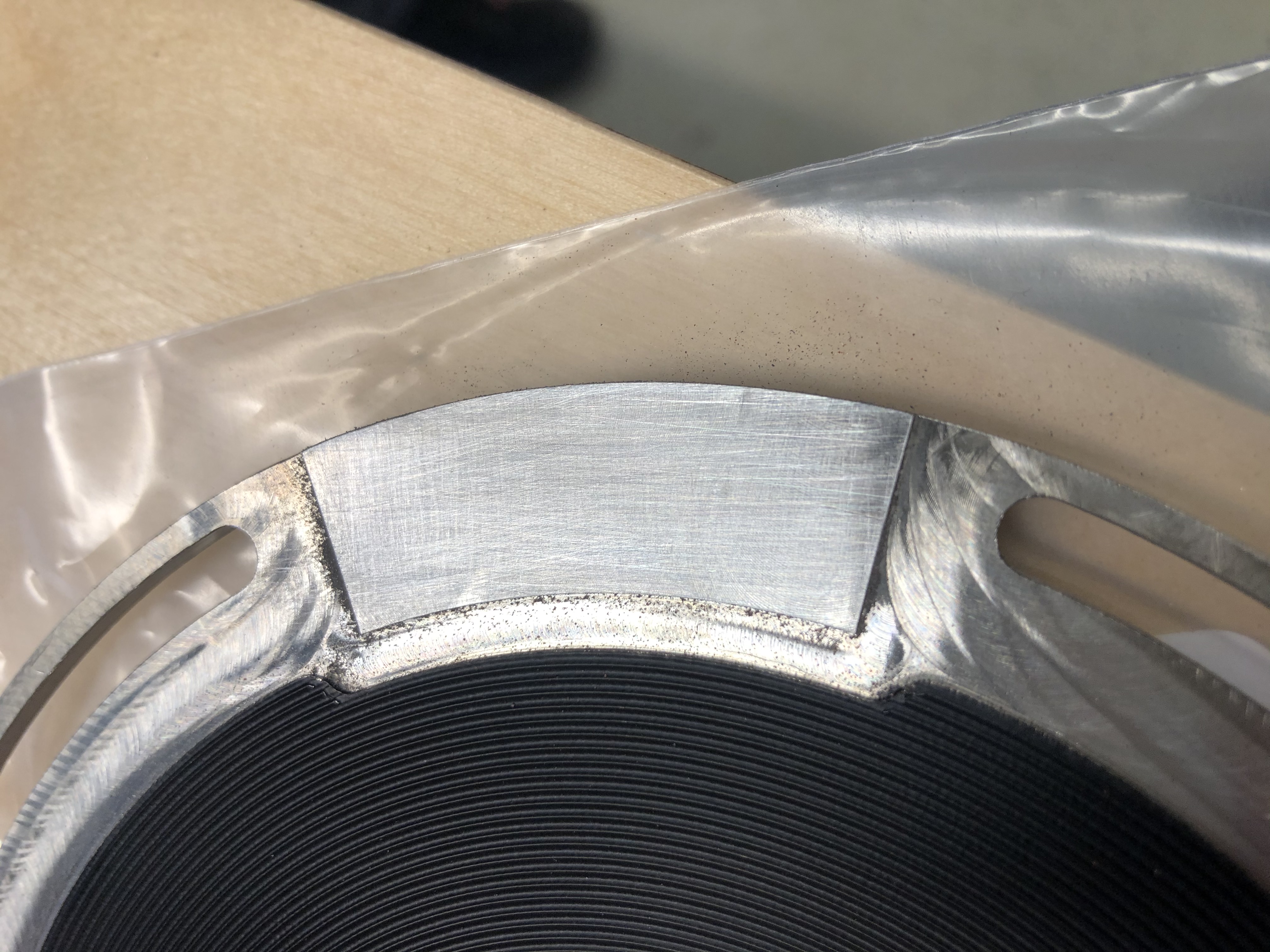
An Rowe-Ackermann Schmidt-Astrograph RASA 11" oder RASA 36cm Systemen kann es bei besonders schwerer Zuladung dazu kommen, dass der jeweilige RASA UFC-Adapter ([product sku="2459126"] bzw. [product sku="2459135"]) lateral zur Schmidtplatte verrutscht, wenn das Teleskop von Ost nach West schenkt. Da bei den RASA Systemen ein seitlicher Zentrierbund nicht vorhanden ist, kann der Adapter um ein paar Zehntel Millimeter verrutschen. Dieses Problem lässt sich nur durch Friktion lösen.
Daher ist es zunächst sehr wichtig, dass die Überwurfmutter fest angezogen wird.
Darüber hinaus haben wir seit April 2020 die Flanschflächen der Adapter leicht angeraut, um die Friktion an der Stelle zu erhöhen und einem Durchrutschen entgegen zu wirken.
Bei allen vorher ausgelieferten Adaptern empfehlen wir daher, dies nachträglich zu tun. Es empfiehlt sich hierzu ein normales Schleifpapier mit ca. 180er Körnung.[br]
[br]
Wir empfehlen weiterhin einen Kreuzschliff wie in dem Video unten vorzunehmen, um sowohl in der X- als auch der Y-Achse das Durchrutschen zu verhindern.